Lab 3 LiDAR Point Clouds for Forest Management
Written by Hana Travers-Smith
Lab Overview
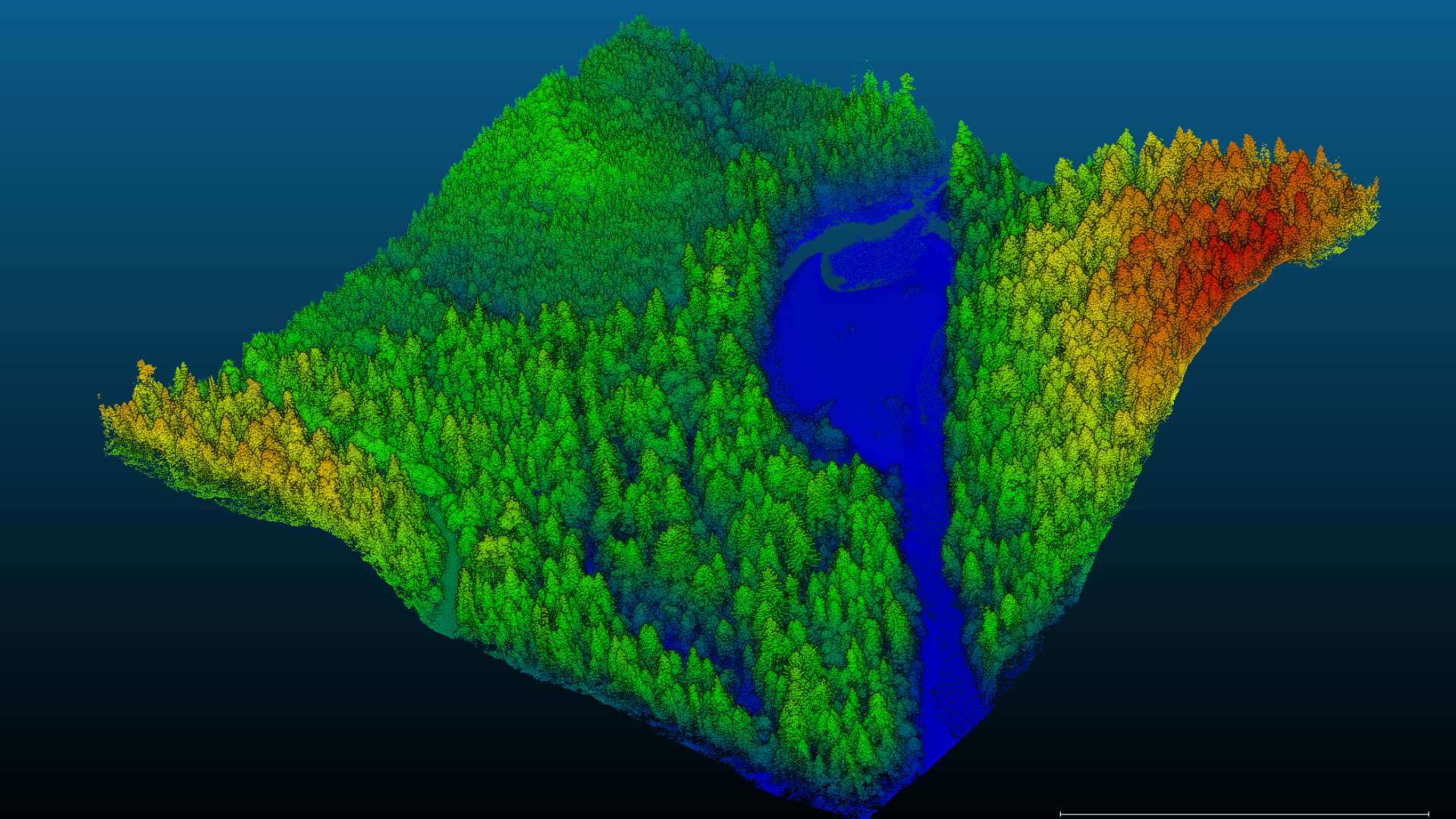
LiDAR, short for Light Detection and Ranging, is a remote sensing technology that uses laser pulses to measure distances and create detailed 3D maps of objects and environments. To map vegetation, LiDAR emits laser beams from an aircraft or ground-based system towards the vegetation canopy. The laser pulses bounce back upon hitting objects, including leaves, branches, and the ground. By measuring the time it takes for the pulses to return, LiDAR calculates the distance to each point, generating a “point cloud” of data.
“Point clouds” can be used to create high-resolution maps depicting the vertical structure of vegetation, including tree heights, density, and ground cover. These maps are invaluable for understanding ecosystem health, biodiversity, carbon storage, and assisting in land management decisions such as forest monitoring, conservation planning, and urban development.
In this lab you will use high resolution LiDAR data collected by the City of Vancouver to create a model of terrain and vegetation for a forest located on UBC campus.
Task 1: Load and understand LiDAR data in a Map Project
Step 1: Download the LiDAR data from the following link: https://opendata.vancouver.ca/explore/dataset/lidar-2018/information/
THe data is split up into a tiled grid system. You will download one tile covering a section of UBC. Use the Table view and search for the following tile and download it: 4840E_54550N by clicking on the .zip link. You can select the “Map” and then look at the tiles that cover Pacific Spirit Park.
Use the metadata from the City of Vancouver data portal to answer the following questions:
Q1. What is the horizontal and vertical datum of the LAS dataset? Why is it important for Lidar data to have both horizontal AND vertical datums?
Q2: What is the point density of the dataset (points per m2)?
Step 2: Create a new ArcGIS Map Project and save it to the default directory.
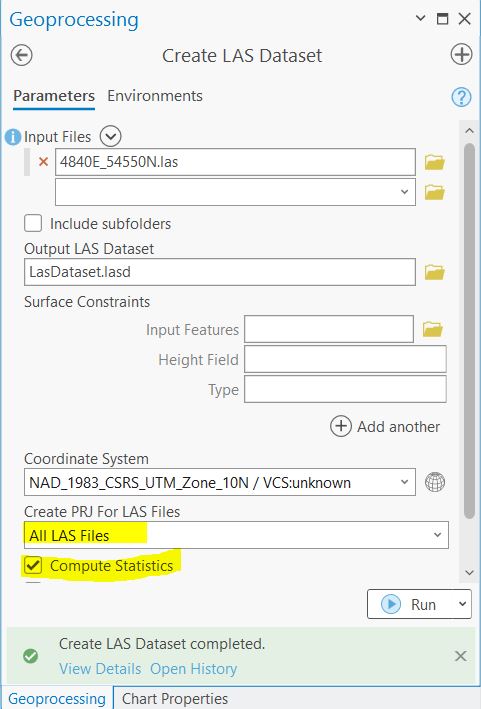
ArcGIS Pro has several tools that we can use to view and analyse LiDAR point clouds. In order to view the dataset, we need to import it as a LAS Dataset. Analysis > Tools > type ‘Create LAS dataset’ in the search box.
- Input File: 4840E_54550N.las
- Output LAS Dataset: LAS Dataset.lasd
- Coodinate System: Use the horizontal datum from the dataset specifications
- Create PRJ for LAS Files: All LAS files
- Check the ‘Compute Statistics’ box.
- Surface Constraints can be left blank
Step 3: Depending on the zoom extent, you may only see the red bounding box of the las file; this isn’t an error, you just need to zoom in to see the actual points.
The points can be classified into the following categories:
- Ground
- Non-Ground
- 1st Return (highest feature)
The default display is that no point cloud filters are applied. To quickly filter only ground points right click on the file in the Contents Pane, navigate to ‘LAS Filters’, and click ‘Ground’.
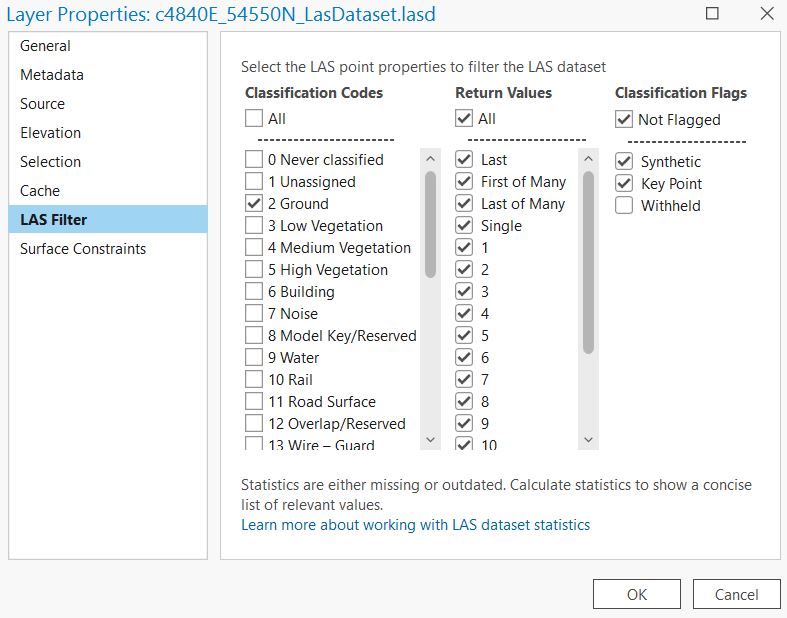
There is also a more detailed classification system, which includes vegetation, water, noise, buildings etc. Right-click on the the file > Properties > LAS Filter. This menu gives you more control for which points you want to display from the dataset.
Task 2: Create a DEM, DSM and CHM
In this task we will create 3 raster datasets by interpolating heights from the point cloud to create continuous surfaces:
- Digitial Elevation Model (DEM) - sometimes referred to as a Digitial Terrain Model (DTM)
- Digital Surface Model (DSM)
- Canopy Height Model (CHM)
Q3. What does a DEM, DSM and CHM represent? How do you interpret the values in each one?
Step 1: First, we will create a DEM from the .lasd point cloud. Filter the point cloud so that only points labelled ‘02 Ground’ are displayed.
Analysis > Tools > Search for LAS Dataset to Raster. We will use the Binning method to interpolate elevation. This method works by dividing the point cloud into cells (pixels) and assigning a value to each cell based on the heights of all the points in the cell. For example, cell values could be assigned as the average height of all points within a 10 m x 10 m pixel.
- Input LAS Dataset: LAS Dataset.lasd
- Output Raster: DEM
- Value Field: Elevation
- Interpolation Type: Binning
- Cell Assignment: Average
- Void Fill Method: Linear
- Output Data Type: Floating Point
- Sampling Type: Cell size
- Sampling Value: 10 (this defines the resolution of the output raster as 10m)
- Z factor: 1
Q4. What is the minimum and maximum value of the DEM?
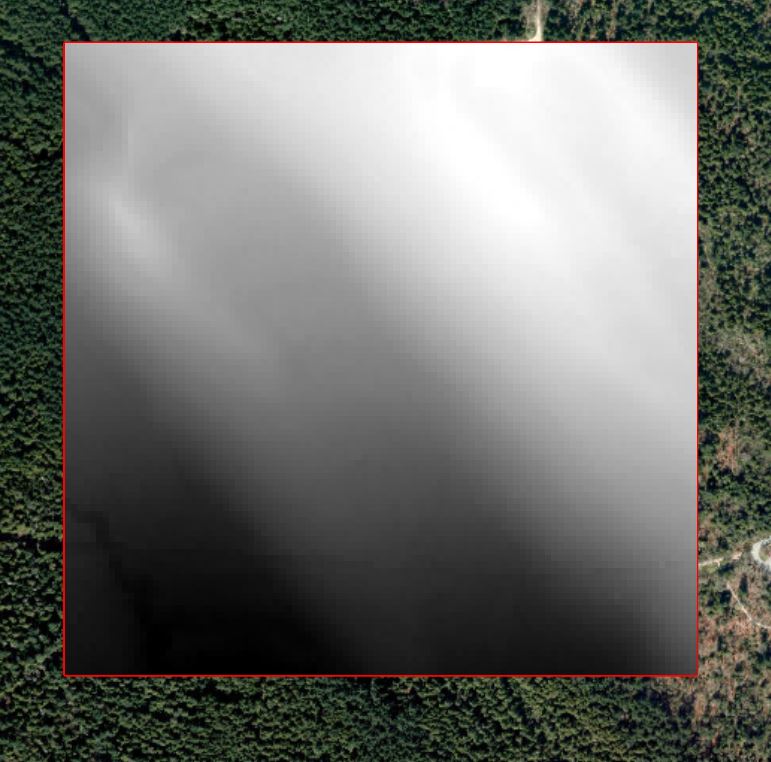
You should now have something that looks like this:
Step 2: Next, we will create a DSM. We need to ensure that all point labelled as ‘Noise’ are filtered out from the dataset, we will also filter out ‘Ground’ points and just retain points coming from vegetation/infrastructure. Navigate to the LAS Filter menu in the data Properties tab.
Uncheck the following codes:
- 0 Never Classified
- 1 Unassigned
- 2 Ground
- 7 Noise
Once you have correctly filtered the point cloud open the LAS Dataset to Raster tool. This time we will use the Maximum value as the Cell Assignment. Name the output raster DSM. All other settings can stay the same as the DEM. > Run
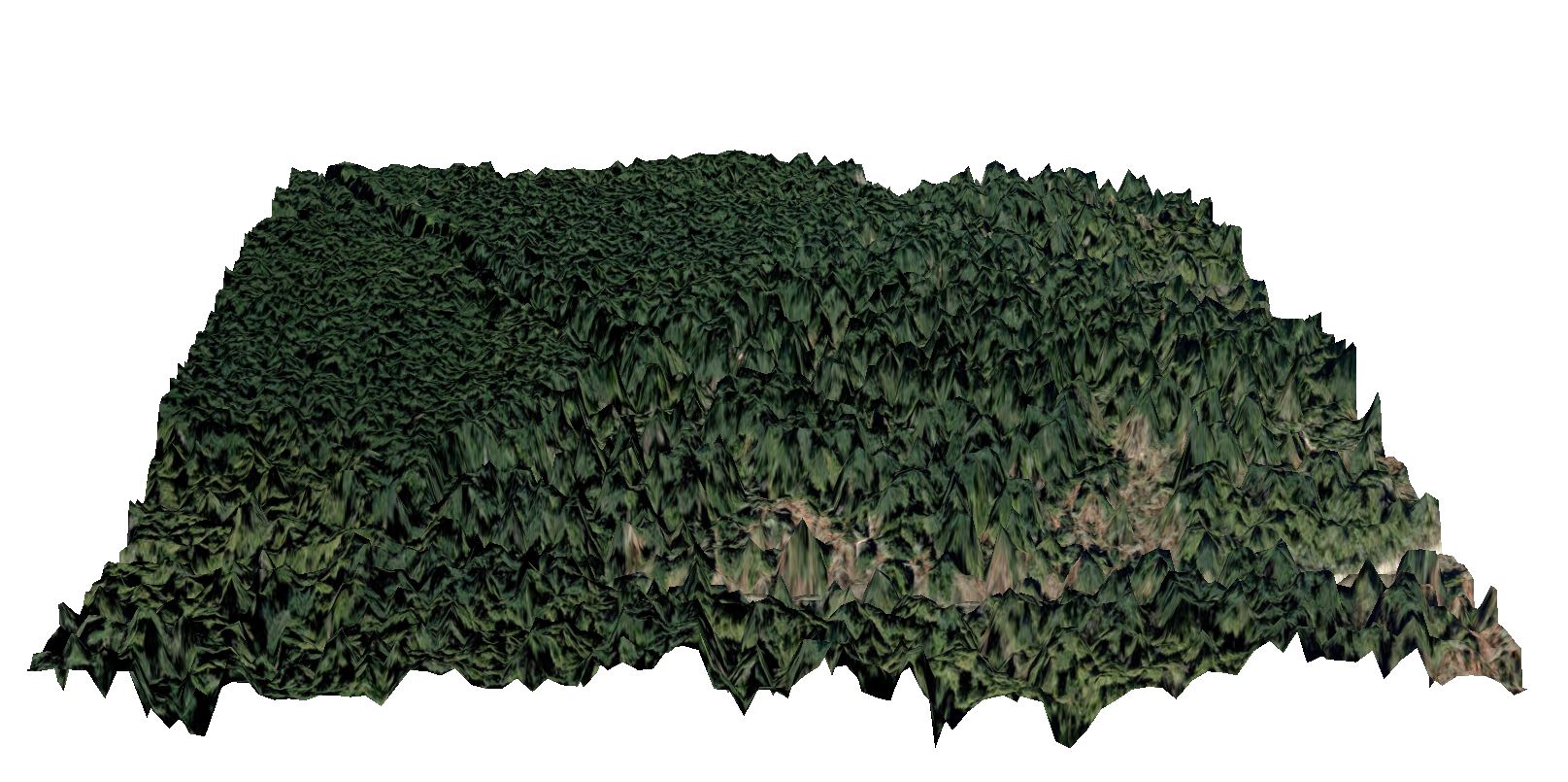
Q6. What features or land cover types can you idenify from the DSM?
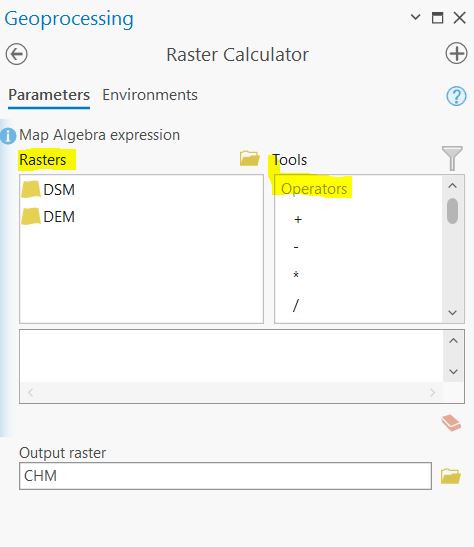
Step 3: Finally, we will create a CHM using the DEM and DSM. Navigate to Analysis > Tools > Raster Calculator (Image Analyst Tools).This tool allows you to create a new raster by combining multiple rasters using simple mathematical operators (adding, subtracting etc).
Calculate the CHM as: DSM - DEM
Task 3: Mapping Tree Tops
Using what you learned in the last task, now you will create a point shapefile of treetops using a higher resolution canopy height model.
Step 1: First, we will derive a DSM using points representing High Vegetation. Open the LAS Filter menu and make sure only points labelled 5 High Vegetation are checked.
Next, use the LAS Dataset to Raster tool to create a raster from the filtered point cloud with the following properties:
- 1m spatial resolution
- the raster values should represent the highest point in each cell
- name the output DSM_1m
Step 2: Next, produce a DEM DEM_1m at the same spatial resolution of 1m using what you learned in the last task.
Step 3: Again following what you learned in the last task, subtract the 1m DEM from the 1m DSM and name the output file TreeTops.
Q8. What features are now visible in the 1m DSM that were not visible in the 10m DSM?
Step 4: Next we will use the Focal Statistics Tool to identify the maximum height of tree crowns across the forest. We will use a Circular Neighborhood with a Radius of 5. This will calculate the maximum elevation observed within a 11m circular moving window (5m is the radius, 10m is the diameter, plus one more cell for the focal cell = 11m). Use the following parameters:
- Input raster: TreeTops
- Output raster: TreeTop_max
- Neighbourhood: Circle
- Radius: 5
- Unit type: Cell
- Statistic Type: Maximum
- Ignore no data in calculations: Checked
Q9. What is a moving window? If you are using a focal maximum, explain how cell values assigned in the final output.
Step 3: Open the Raster Calculator tool. We will use this tool to find the pixels in the TreeTops raster that match the maximum focal height in the TreeTops_max. To do this, we will use a True/False conditional statement using the Con syntax:
Con(statement, iftrue, if false) - Essentially for each pixel the statement is evaulated and if it is true an action is taken, and if it is false a different action is taken.
Enter the following statement in the Raster Calculator tool:
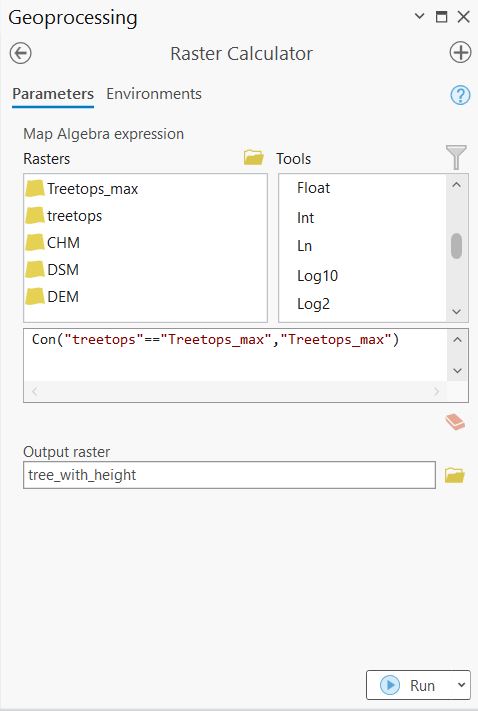
Con(“TreeTops”==”TreeTops_max”, ”TreeTops_max”)
Basically, this is a calculation that evaluates the statement “where is the TreeTops raster equal to the maximum elevation value identified from the focal statistics?” Where these pixels match, write the maximum value to the output. Otherwise, write a value of NoData to the output. Save the output as tree_with_height.
Refer to the screenshot below for writing this statement correctly.
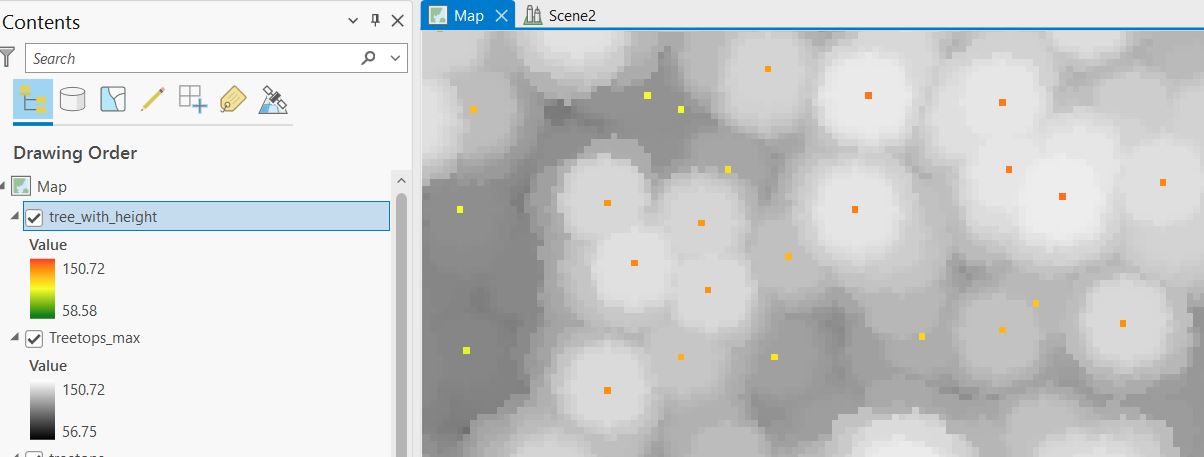
Inspect the output. Zooming in reveals what we have done. Pixels that represent the maximum height in each focal window are assigned a value equal to the maximum height, while all other pixels have a NoData value.
Step 4: Open the ‘Raster to Point’ tool. The input raster is the raster that you just made. Field is Value, and the output name should be ‘tree_with_height’.
- Input: tree_with_height
- Field: Value
- Output: Final_treetops
Task 4: Visualization in 3D
So far we have worked with the point cloud data in flat, 2-dimensional space. In this task, you will explore the point cloud in 3-dimensions in a Scene.
On the top ribbon Insert > New Map > New Local Scene.
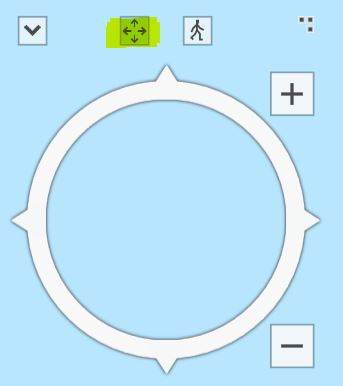
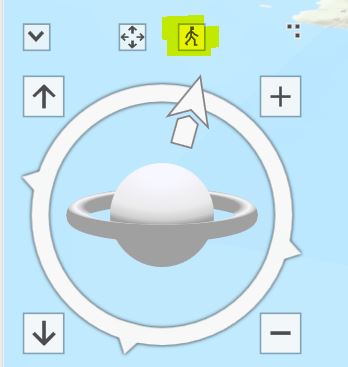
Step 1: Practice using the On Screen Navigator to manipulate the scene. The first toggle let’s you navigate in the normal directions and the second toggle (the person) let’s you rotate the scene in 3D.
Step 2: Navigate to the UBC campus study area and change the Basemap to Imagery in the Map tab located on the top ribbon. In the Contents pane, right-click Ground, located below the Elevation Surfaces group layer. Click ‘Add Elevation Source’. Browse to the location of your 10m DSM and select it. You can now start to see how the surface features have been incorporated into the surface. Make sure to zoom in to look at areas with high relief and roads.
Add the TreeTops_Final point shapefile to the Scene.
Step 3: Click on ‘Ground’ underneath the Elevation Surfaces tab. On the top ribbon click ’Elevation Surface Layer. Set the Vertical Exaggeration to 2 - this will increase the contrast between high/low elevation in the scene. Finally, turn off the WOrldElevation3D/Terrain3d layer to better see how the DSM.